本文基于 Linux 6.9 内核源码进行分析。
几个数据结构
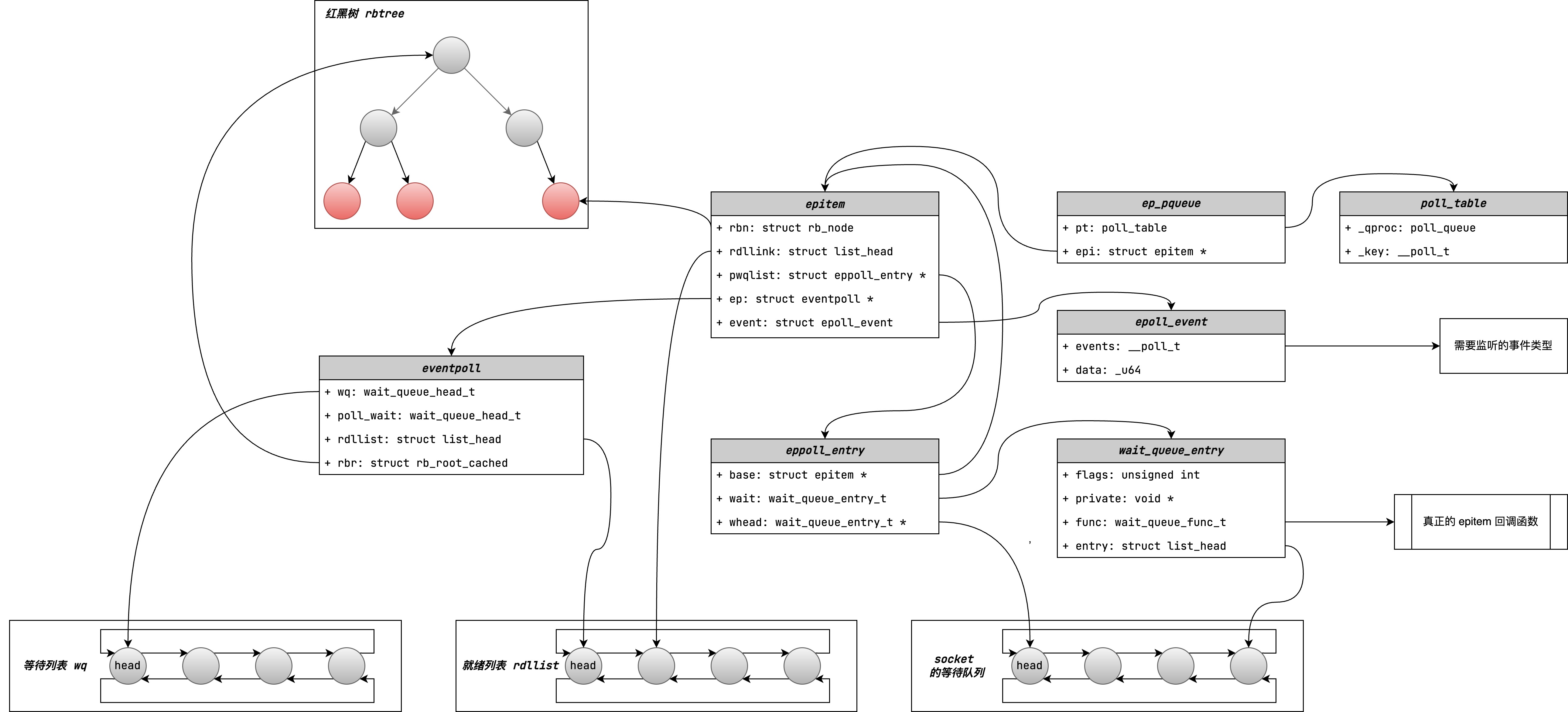
eventpoll
这是 epoll 的主要数据结构,它用于存储 epoll 的相关信息,包括等待队列、就绪队列、红黑树等。
struct eventpoll {
wait_queue_head_t wq; // epoll 的等待队列:用于存储等待的进程/线程,指向等待队列头
wait_queue_head_t poll_wait;// 这个 poll_wait 等待队列只有在 epoll 嵌套的情况下才会用到
struct list_head rdllist; // 就绪队列:用于存储就绪的 fd,指向就绪队列头
struct rb_root_cached rbr; // 红黑树:用于存储所有的 fd,指向红黑树根节点
struct wakeup_source *ws; // 一个唤醒源,用于唤醒进程
};
epitem
epitem 的作用是将 fd、就绪队列、红黑树节点等信息封装在一起。
struct epitem {
union {
struct rb_node rbn; // 红黑树节点,用于存储 fd,指向红黑树节点
struct rcu_head rcu; // 用于释放 epitem
};
struct list_head rdllink; // 就绪队列节点,用于存储就绪的 fd,指向就绪队列节点
struct eventpoll *ep; // 指向 eventpoll
struct epoll_filefd ffd; // epoll 文件描述符
struct wakeup_source *ws; // 一个唤醒源,用于唤醒进程
struct epoll_event event; // 监听的事件
};
ep_pqueue
给 poll 队列封装的结构体,用于存储 poll_table 和 epitem。
struct ep_pqueue {
poll_table pt;
struct epitem *epi;
};
poll_table
poll_table 的作用是封装 poll 队列的处理函数和 key。
typedef struct poll_table_struct {
poll_queue_proc _qproc;
__poll_t _key;
} poll_table;
eppoll_entry
struct eppoll_entry {
struct eppoll_entry *next; // 指向 epitem 的 epoll_entry
struct epitem *base; // 指向 epitem
wait_queue_entry_t wait; // 等待队列项
wait_queue_head_t *whead; // 指向 socket 等待队列头
};
wait_queue_entry
wait_queue_entry 的作用是封装等待队列的相关信息。
struct wait_queue_entry {
unsigned int flags;
void *private;
wait_queue_func_t func;
struct list_head entry;
};
epoll_create
// 定义 epoll_create 系统调用
SYSCALL_DEFINE1(epoll_create, int, size)
{
if (size <= 0)
return -EINVAL;
return do_epoll_create(0); // 调用 do_epoll_create 函数,[[具体实现见下面]]
}
static int do_epoll_create(int flags)
{
int error, fd;
struct eventpoll *ep = NULL;
struct file *file;
BUILD_BUG_ON(EPOLL_CLOEXEC != O_CLOEXEC);
if (flags & ~EPOLL_CLOEXEC)
return -EINVAL;
error = ep_alloc(&ep); // 为 eventpoll 分配内存,[[具体实现见下面]]
if (error < 0)
return error;
// 创建 eventpoll 所需的东东。也就是一个文件结构和一个空闲的文件描述符。
fd = get_unused_fd_flags(O_RDWR | (flags & O_CLOEXEC)); // 获取一个未使用的文件描述符
if (fd < 0) {
error = fd;
goto out_free_ep;
}
// 创建一个文件结构
file = anon_inode_getfile("[eventpoll]", &eventpoll_fops, ep, O_RDWR | (flags & O_CLOEXEC));
if (IS_ERR(file)) {
error = PTR_ERR(file);
goto out_free_fd;
}
ep->file = file; // 将文件结构赋值给 eventpoll
// 将文件描述符和文件结构关联起来
fd_install(fd, file);
return fd;
out_free_fd:
put_unused_fd(fd);
out_free_ep:
ep_clear_and_put(ep);
return error;
}
static int ep_alloc(struct eventpoll **pep)
{
struct eventpoll *ep;
ep = kzalloc(sizeof(*ep), GFP_KERNEL); // 为 eventpoll 分配内存
if (unlikely(!ep))
return -ENOMEM;
mutex_init(&ep->mtx); // 初始化锁
rwlock_init(&ep->lock);
init_waitqueue_head(&ep->wq); // 初始化等待队列
init_waitqueue_head(&ep->poll_wait); // 初始化 poll 等待队列
INIT_LIST_HEAD(&ep->rdllist); // 初始化就绪队列
ep->rbr = RB_ROOT_CACHED;
ep->ovflist = EP_UNACTIVE_PTR;
ep->user = get_current_user();
refcount_set(&ep->refcount, 1); // 引用计数初始化为 1
*pep = ep; // 将 eventpoll 赋值给 pep
return 0;
}

epoll_ctl
// 定义 epoll_ctl 系统调用
SYSCALL_DEFINE4(epoll_ctl, int, epfd, int, op, int, fd,
struct epoll_event __user *, event)
{
struct epoll_event epds;
// ep_op_has_event 用于告诉 epoll_ctl 是否需要将 event 拷贝到内核空间
// ep_op_has_event 的实现就一行,return op != EPOLL_CTL_DEL;
if (ep_op_has_event(op) &&
copy_from_user(&epds, event, sizeof(struct epoll_event)))
// 将 event 拷贝到内核空间,epds 是内核空间的 epoll_event
return -EFAULT;
return do_epoll_ctl(epfd, op, fd, &epds, false); // 调用 do_epoll_ctl 函数,[[具体实现见下面]]
}
int do_epoll_ctl(int epfd, int op, int fd, struct epoll_event *epds, bool nonblock)
{
int error;
int full_check = 0;
struct fd f, tf;
struct eventpoll *ep;
struct epitem *epi;
struct eventpoll *tep = NULL;
error = -EBADF;
f = fdget(epfd); // 获取 epfd 对应的文件描述符
if (!f.file)
goto error_return;
tf = fdget(fd); // 获取 fd 对应的文件描述符
// f 为 epoll 文件描述符,tf 为我们要监听的文件描述符
if (!tf.file)
goto error_fput;
error = -EPERM;
if (!file_can_poll(tf.file)) // 检查 tf 是否支持 poll,不支持直接返回
goto error_tgt_fput;
if (ep_op_has_event(op)) // 如果 op 是 EPOLL_CTL_ADD 或 EPOLL_CTL_MOD
ep_take_care_of_epollwakeup(epds); // 保持线程唤醒状态,防止线程被挂起
error = -EINVAL;
// 如果 epfd 和 fd 是同一个文件描述符
// 或者 epfd 不是 epoll 文件描述符,直接返回
if (f.file == tf.file || !is_file_epoll(f.file))
goto error_tgt_fput;
// 省略一段检查错误的代码
ep = f.file->private_data; // 获取 epfd 中的 eventpoll 结构体
error = epoll_mutex_lock(&ep->mtx, 0, nonblock);
if (error)
goto error_tgt_fput;
// 此处省略了一坨用于处理 epoll 嵌套的情况的代码,不管
epi = ep_find(ep, tf.file, fd); // 在红黑树中查找 fd 对应的 epitem,可能找不到
error = -EINVAL;
switch (op) { // 根据 op 的不同,执行不同的操作
// ADD
case EPOLL_CTL_ADD:
if (!epi) { // 红黑树里没有 fd 才插入
epds->events |= EPOLLERR | EPOLLHUP;
error = ep_insert(ep, epds, tf.file, fd, full_check); // 插入 fd 到红黑树,[[具体实现见下面]]
} else
error = -EEXIST;
break;
// DEL
case EPOLL_CTL_DEL:
if (epi) {
ep_remove_safe(ep, epi); // 在红黑树删除 fd,[[具体实现见下面]]
error = 0;
} else {
error = -ENOENT;
}
break;
// MOD
case EPOLL_CTL_MOD:
if (epi) {
if (!(epi->event.events & EPOLLEXCLUSIVE)) {
epds->events |= EPOLLERR | EPOLLHUP;
error = ep_modify(ep, epi, epds); // 修改 fd 的监听事件,[[具体实现见下面]]
}
} else
error = -ENOENT;
break;
}
mutex_unlock(&ep->mtx);
error_tgt_fput:
if (full_check) {
clear_tfile_check_list();
loop_check_gen++;
mutex_unlock(&epnested_mutex);
}
fdput(tf);
error_fput:
fdput(f);
error_return:
return error;
}
ep_insert
static int ep_insert(struct eventpoll *ep, const struct epoll_event *event,
struct file *tfile, int fd, int full_check)
{
int error, pwake = 0;
__poll_t revents;
struct epitem *epi;
struct ep_pqueue epq; // 一个 epitem 和回调函数的包装
struct eventpoll *tep = NULL; // 这个是用于处理 epoll 嵌套的情况
// 省略一段不重要的代码,问题不大
// 为 epitem 分配内存
if (!(epi = kmem_cache_zalloc(epi_cache, GFP_KERNEL))) {
percpu_counter_dec(&ep->user->epoll_watches);
return -ENOMEM;
}
// 构造 epitem
INIT_LIST_HEAD(&epi->rdllink);
epi->ep = ep;
ep_set_ffd(&epi->ffd, tfile, fd);
epi->event = *event;
epi->next = EP_UNACTIVE_PTR;
// 省略不重要的代码
ep_rbtree_insert(ep, epi); // 将 epitem 插入红黑树
// 省略不重要的代码
epq.epi = epi; // 将 epitem 放入 ep_pqueue 这个队列
// 将 ep_ptable_queue_proc 函数赋值给 ep_pqueue.pt 的函数指针,用于处理 poll 队列,会在下一行的 ep_item_poll 函数中回调
init_poll_funcptr(&epq.pt, ep_ptable_queue_proc);
revents = ep_item_poll(epi, &epq.pt, 1); // 调用 ep_item_poll 函数 [[具体实现见下面]]
// 省略不重要的代码
// 如果 fd 已就绪,将其放入就绪队列
if (revents && !ep_is_linked(epi)) {
list_add_tail(&epi->rdllink, &ep->rdllist); // 加入到就绪队列尾部
ep_pm_stay_awake(epi); // 保持唤醒状态
if (waitqueue_active(&ep->wq))
wake_up(&ep->wq); // 唤醒 wq 等待队列
// 省略和 epoll 嵌套有关的代码
}
write_unlock_irq(&ep->lock);
// 省略和 epoll 嵌套有关的代码
return 0;
}
static __poll_t ep_item_poll(const struct epitem *epi, poll_table *pt, int depth)
{
struct file *file = epi_fget(epi);
__poll_t res;
if (!file)
return 0;
pt->_key = epi->event.events;
if (!is_file_epoll(file))
// 如果不是 epoll fd,即普通 fd(socket fd),调用 vfs_poll 函数
// 大部分都是这一情况!!!
res = vfs_poll(file, pt);
else
// 这种情况属于嵌套 epoll,调用 __ep_eventpoll_poll 函数
res = __ep_eventpoll_poll(file, pt, depth); // res 就是 socket 所有就绪的事件
fput(file);
return res & epi->event.events; // 这里才进一步判断是否是我们关心的事件(监听的事件)
}
// 普通 fd 的处理函数
static inline __poll_t vfs_poll(struct file *file, struct poll_table_struct *pt)
{
if (unlikely(!file->f_op->poll))
return DEFAULT_POLLMASK;
// 这里实际上是调用了 socket 的 poll 函数,然后会根据 socket 类型调用不同的函数
// 如 tcp_poll、udp_poll 等
return file->f_op->poll(file, pt); // 先通过 sock_poll,然后这里以 tcp_poll 为例 [[具体实现见下面]]
}
static __poll_t sock_poll(struct file *file, poll_table *wait)
{
struct socket *sock = file->private_data;
const struct proto_ops *ops = READ_ONCE(sock->ops);
// 略一部分,flag 与 busy_poll 有关,不重要
return ops->poll(file, sock, wait) | flag; // 调用 tcp_poll 函数 [[具体实现见下面]]
}
__poll_t tcp_poll(struct file *file, struct socket *sock, poll_table *wait)
{
__poll_t mask;
struct sock *sk = sock->sk;
const struct tcp_sock *tp = tcp_sk(sk);
u8 shutdown;
int state;
sock_poll_wait(file, sock, wait); // sock_poll_wait 函数 [[具体实现见下面]]
state = inet_sk_state_load(sk);
if (state == TCP_LISTEN) // 如果是监听状态,查看 accept 队列是否为空
return inet_csk_listen_poll(sk); // 具体实现是如果不为空,则返回 EPOLLIN | EPOLLRDNORM
// 不是监听状态,就是连接状态,就有可能读写就绪
// 下面一大段就是根据连接状态、接收缓冲区、发送缓冲区等情况来判断是否可读可写
// 这里就省略了
// ...
return mask;
}
static inline void sock_poll_wait(struct file *filp, struct socket *sock, poll_table *p)
{
if (!poll_does_not_wait(p)) {
poll_wait(filp, &sock->wq.wait, p); // [[具体实现见下面]]
smp_mb();
}
}
static inline void poll_wait(struct file * filp, wait_queue_head_t * wait_address, poll_table *p)
{
if (p && p->_qproc && wait_address)
p->_qproc(filp, wait_address, p); // 到这,实际上是调用了 ep_ptable_queue_proc 函数
}
// 重点是这个函数,这是用于将我们的等待队列添加到目标文件唤醒列表的回调。
static void ep_ptable_queue_proc(struct file *file, wait_queue_head_t *whead, poll_table *pt)
{
// container_of 是 Linux 的一个骚操作,用于通过结构体成员获取其所在的结构体的指针,有兴趣可以自行搜索
// 这里是通过 pt 获取 ep_pqueue 结构体的指针,进而获取 epitem
struct ep_pqueue *epq = container_of(pt, struct ep_pqueue, pt);
struct epitem *epi = epq->epi;
struct eppoll_entry *pwq;
if (unlikely(!epi))
return;
// 为 pwq 分配内存
pwq = kmem_cache_alloc(pwq_cache, GFP_KERNEL);
if (unlikely(!pwq)) {
epq->epi = NULL;
return;
}
init_waitqueue_func_entry(&pwq->wait, ep_poll_callback); // 将我们的回调函数赋值给 wait
pwq->whead = whead;
pwq->base = epi;
if (epi->event.events & EPOLLEXCLUSIVE)
add_wait_queue_exclusive(whead, &pwq->wait);
else
add_wait_queue(whead, &pwq->wait); // 将 pwq 加入到 socket 的等待队列
// 这个 pwq 会在 socket 网卡有数据时被中断程序调用,然后调用 pwq 里存的回调函数,即 ep_poll_callback
pwq->next = epi->pwqlist;
epi->pwqlist = pwq;
}

ep_modify
ep_remove_safe
epoll_wait
SYSCALL_DEFINE4(epoll_wait, int, epfd, struct epoll_event __user *, events,
int, maxevents, int, timeout)
{
struct timespec64 to;
// 将 timeout 转换为 timespec64 结构体
// do_epoll_wait [[具体实现见下面]]
return do_epoll_wait(epfd, events, maxevents, ep_timeout_to_timespec(&to, timeout));
}
static int do_epoll_wait(int epfd, struct epoll_event __user *events,
int maxevents, struct timespec64 *to)
{
int error;
struct fd f;
struct eventpoll *ep;
// 这里的 EP_MAX_EVENTS = INT_MAX / sizeof(struct epoll_event)
if (maxevents <= 0 || maxevents > EP_MAX_EVENTS) // maxevents 必须大于 0 且小于 EP_MAX_EVENTS
return -EINVAL;
// 验证用户传递的区域是否可写
if (!access_ok(events, maxevents * sizeof(struct epoll_event)))
return -EFAULT;
f = fdget(epfd); // 获取 epfd 对应的文件描述符
if (!f.file)
return -EBADF;
error = -EINVAL;
if (!is_file_epoll(f.file)) // 确保 epfd 是 epoll 文件描述符
goto error_fput;
ep = f.file->private_data; // 取出 eventpoll 结构体
error = ep_poll(ep, events, maxevents, to); // 调用 ep_poll 函数,[[具体实现见下面]]
error_fput:
fdput(f);
return error;
}
static int ep_poll(struct eventpoll *ep, struct epoll_event __user *events,
int maxevents, struct timespec64 *timeout)
{
int res, eavail, timed_out = 0;
u64 slack = 0;
wait_queue_entry_t wait;
ktime_t expires, *to = NULL;
lockdep_assert_irqs_enabled();
// 计算超时时间
if (timeout && (timeout->tv_sec | timeout->tv_nsec)) {
// 这里是用户指定了超时时间
slack = select_estimate_accuracy(timeout);
to = &expires;
*to = timespec64_to_ktime(*timeout); // 将时间转换为 ktime_t 结构体
} else if (timeout) {
// 这里是用户没有指定超时时间,将会在检查一次事件后返回
timed_out = 1;
}
eavail = ep_events_available(ep); // 检查是否有事件可用 [[具体实现见下面]]
while (1) {
if (eavail) { // 有事件可用
// 尝试将事件传递给用户空间
res = ep_send_events(ep, events, maxevents);
if (res) // 传递成功
return res; // 这里是有事件情况的函数出口
}
if (timed_out)
return 0; // 这里是超时情况的函数出口
// 这里省略了 busy loop 的代码
if (signal_pending(current)) // 如果有信号挂起,直接返回
return -EINTR;
init_wait(&wait); // 初始化等待队列项,这里就和 ep.wq 有关了
// 设置回调函数,在唤醒进程后自动删除该进程在 ep.wq 中对应的项
wait.func = ep_autoremove_wake_function;
write_lock_irq(&ep->lock);
__set_current_state(TASK_INTERRUPTIBLE); // 设置当前进程状态为 可中断睡眠
eavail = ep_events_available(ep); // 再次检查是否有事件可用
if (!eavail) // 没有事件可用,将当前进程加入到等待队列
__add_wait_queue_exclusive(&ep->wq, &wait);
write_unlock_irq(&ep->lock);
if (!eavail)
// 没事件,将当前进程挂起,如果有中断信号,则会被唤醒,超时也会被唤醒。
// 如果是被有事件的中断信号唤醒的,
// 则先会调用 epitem 的回调函数,即在 epoll_ctl 中注册的 ep_poll_callback 函数,
// 将就绪的 fd 放入 rdllist 就绪队列,再唤醒刚刚加入到 ep->wq 的线程。
// 然后再返回。
timed_out = !schedule_hrtimeout_range(to, slack, HRTIMER_MODE_ABS);
__set_current_state(TASK_RUNNING); // 设置当前进程状态为运行态
eavail = 1;
if (!list_empty_careful(&wait.entry)) {
write_lock_irq(&ep->lock);
if (timed_out)
eavail = list_empty(&wait.entry);
__remove_wait_queue(&ep->wq, &wait);
write_unlock_irq(&ep->lock);
}
}
}
static inline int ep_events_available(struct eventpoll *ep)
{
return !list_empty_careful(&ep->rdllist) ||
READ_ONCE(ep->ovflist) != EP_UNACTIVE_PTR;
}
static int ep_send_events(struct eventpoll *ep, struct epoll_event __user *events, int maxevents)
{
struct epitem *epi, *tmp;
LIST_HEAD(txlist); // txlist 是用来向用户空间拷贝数据的链表
poll_table pt;
int res = 0;
if (fatal_signal_pending(current))
return -EINTR;
init_poll_funcptr(&pt, NULL);
mutex_lock(&ep->mtx);
ep_start_scan(ep, &txlist); // 这个函数用于将 ep->rdllist 拷贝到 txlist
list_for_each_entry_safe(epi, tmp, &txlist, rdllink) { // 遍历 txlist
struct wakeup_source *ws;
__poll_t revents;
if (res >= maxevents)
break;
// 确保进程唤醒
ws = ep_wakeup_source(epi);
if (ws) {
if (ws->active)
__pm_stay_awake(ep->ws);
__pm_relax(ws);
}
list_del_init(&epi->rdllink); // 从就绪队列中删除 epi
// 注意!rdllist 里的 epi 有事件就绪,但不一定是我们感兴趣的事件!
// 所以这里查询 socket 的具体事件,是否为我们感兴趣的事件!
// 也就是说,rdllist 只能告诉我们可能有任何事件发生,
// 但具体是什么事件,是否是我们感兴趣的事件,需要通过 ep_item_poll 函数来判断
revents = ep_item_poll(epi, &pt, 1);
if (!revents)
continue; // 没有我们感兴趣事件,遍历下一个 epi
// 有我们感兴趣的事件,将 revents 和 epi->event.data 其拷贝到用户空间的 events 里
events = epoll_put_uevent(revents, epi->event.data, events); // [[具体实现见下面]]
if (!events) {
list_add(&epi->rdllink, &txlist); // 拷贝失败,将 epi 放回 txlist
ep_pm_stay_awake(epi);
if (!res)
res = -EFAULT;
break;
}
res++;
if (epi->event.events & EPOLLONESHOT) // 处理 EPOLLONESHOT 的情况
epi->event.events &= EP_PRIVATE_BITS;
else if (!(epi->event.events & EPOLLET)) { // 处理 EPOLLET 的情况
// 如果是 水平触发 模式,将 epi 放回就绪队列,等待下一次事件
list_add_tail(&epi->rdllink, &ep->rdllist);
ep_pm_stay_awake(epi);
}
}
// 要理解这个函数,我们得知道,如果在扫描过程中有 fd 要加入就绪队列,
// 由于 rdllist 已经被锁住了,所以会将这个 fd 放入 ovflist 中,
// 这个函数就是将 ovflist 中的 fd 放回入 rdllist 中。
ep_done_scan(ep, &txlist);
mutex_unlock(&ep->mtx);
return res;
}
epoll_put_uevent(__poll_t revents, __u64 data, struct epoll_event __user *uevent)
{
// 注意这里依然使用的是 __put_user 函数,即从内核空间拷贝到用户空间,并没有使用共享内存!
if (__put_user(revents, &uevent->events) || __put_user(data, &uevent->data))
return NULL;
return uevent+1;
}

ep_poll_callback
// 这是传递给等待队列唤醒机制的回调函数。当存储的文件描述符有事件要报告时,它会被调用。
// 其实就干两件事,一是将就绪的 fd 放入就绪队列,二是唤醒等待队列。
static int ep_poll_callback(wait_queue_entry_t *wait, unsigned mode, int sync, void *key)
{
int pwake = 0;
struct epitem *epi = ep_item_from_wait(wait);
struct eventpoll *ep = epi->ep;
__poll_t pollflags = key_to_poll(key);
unsigned long flags;
int ewake = 0;
// 一通检查猛如虎
read_lock_irqsave(&ep->lock, flags);
ep_set_busy_poll_napi_id(epi);
if (!(epi->event.events & ~EP_PRIVATE_BITS))
goto out_unlock;
if (pollflags && !(pollflags & epi->event.events))
goto out_unlock;
if (READ_ONCE(ep->ovflist) != EP_UNACTIVE_PTR) {
if (chain_epi_lockless(epi))
ep_pm_stay_awake_rcu(epi);
} else if (!ep_is_linked(epi)) { // 如果 epi 不在就绪队列
// fd 就绪,将其放入就绪队列
if (list_add_tail_lockless(&epi->rdllink, &ep->rdllist))
ep_pm_stay_awake_rcu(epi);
}
// 放入就绪队列后,唤醒等待队列
if (waitqueue_active(&ep->wq)) {
if ((epi->event.events & EPOLLEXCLUSIVE) && !(pollflags & POLLFREE)) {
switch (pollflags & EPOLLINOUT_BITS) {
case EPOLLIN:
if (epi->event.events & EPOLLIN)
ewake = 1;
break;
case EPOLLOUT:
if (epi->event.events & EPOLLOUT)
ewake = 1;
break;
case 0:
ewake = 1;
break;
}
}
wake_up(&ep->wq); // 唤醒进程
}
// 省略和 epoll 嵌套有关的代码
out_unlock:
read_unlock_irqrestore(&ep->lock, flags);
// 省略和 epoll 嵌套有关的代码
return ewake;
}
